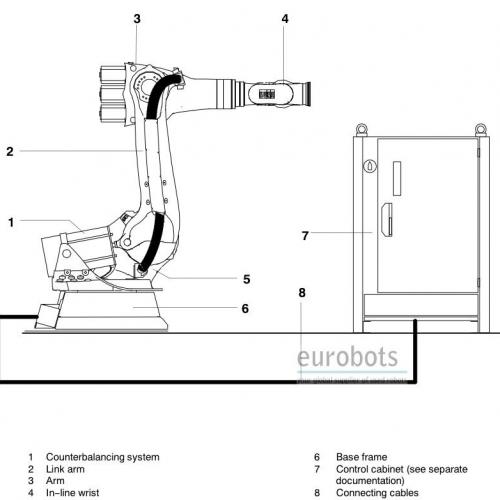
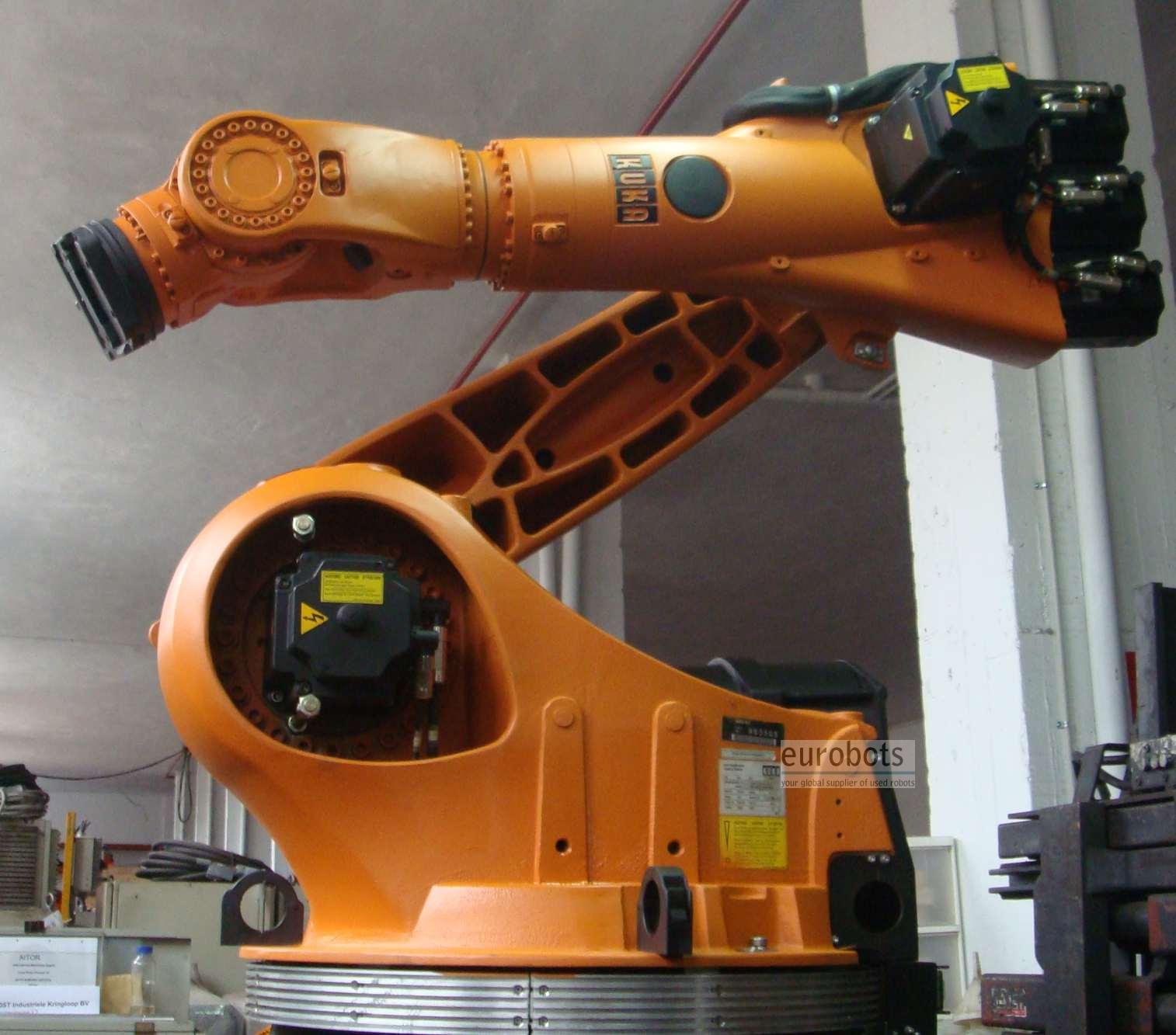
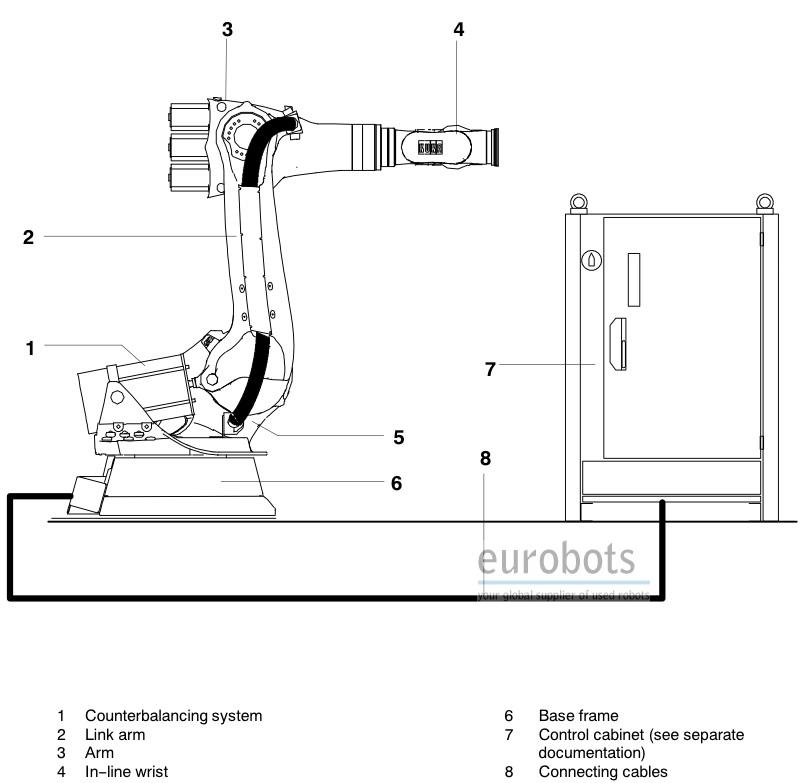
KUKA KR210 VKRC2 control
Robot industriale KUKA KR210 ha 6 assi con controllo VKRC2. Robot con un alto carico di peso per applicazioni generali. Questo robot è essenzialmente uguale al KR210 serie 2000 controllo KRC2 controllo standard. La differenza è nel software che usa un sw della KUKA 3.3.4 disegnato dalla casa automobilistica Volkswagen. L’ hardware della armadio di controllo è quasi identico, la filosofia e il sistema di programmazione è uguale.
Differenze di programmazione tra il KRC2 e il VKRC2:
La maggior differenza è data dal sistema che è aperto dall’inizio, si possono controllare le opzioni per la programmazioni aperte ad ogni programma in due livelli:
Username:
Livello predefinito di programmazione che ci permette di calcolare gli attrezzi per lavorare e basi caricate e anche per la calibrazione esterna del robot, lo sviluppo di programmi ,modifiche ,duplicati, cancellazione ecc. Inoltre in questo livello si possono modificare delle variabili definite nel programma e vedere output permettendo inputs.
Expert:
Questo livello è definito avanzato ,tutte le opzioni sono aperte al programma, in questo caso, la creazione di programmi è esclusa, alternativamente possiamo rivedere i programmi progettati per introdurre il codice del programma. E’ ha questo livello che i drivers sono anche configurati per comunicare con la periferica.
Tutti i programmi creati con questo sistema hanno nomi costruiti con lo sviluppo considerato appropriato per ciascun ruolo da compiere "Grab_part", "lift_fixer" etc ...
Il management tradizionale dei programmi può essere fatto attraverso il programma “Cell” connesso al PLC e tutti I programmi possono essere connessi tra di loro.
Sistema di Controllo “VKRC2”
Questo sistema di controllo è usato dal gruppo Automobilistico Volkswagen.La caratteristica principale è la facilità della programmazione e la rapida diagnosi del sistema.Nel sistema VKRC2 i modelli sono sempre user and expert ma tutto può essere fatto dal nome dell’user. L’accesso expert-level si ottiene con una chiave.La programmazione è fatta in minor tempo perché la principale caratteristica dell ‘introduzione del codice, che è fatto con differenti opzioni che sono apparse nelle chiavi, dipendendo dalle opzioni che abbiamo; in breve non un cattivo ingresso nel codice dei programmi. Ovviamente, il sistema non ti dice se le istruzioni che abbiamo aggiunto sono corrette.Esempio: (OUT "56" TRUE), quando forse sarebbe necessario dire (OUT "56" FALSE)
Folge:I programmi possono essere usati con questo sistema e avere una struttura definita.Questi programmi sono controllati attraverso un’automazione esterna e puo’ solo essere chiamata da un automa.
UP: Sub con movimento puo’ solo essere chiamato da uno o un altro UP Folge
Makro:Sub nessun movimento che puo’ essere chiamato da un Folge,un UP o un altro Makro.
Con questo sistema,noi perdiamo la capacita’ di calcolare le basi. Questo puo’ essere risolto diversamente con 3 punti definiti nel database e trattarli come se loro fossere un attrezzo esterno.Dopo aver calcolato l’attrezzo, noi calcoliamo da un punto a qualunque altro punto della base e le cordinate Cartesiane risulatanti sara’ il punto particolare.
In conclusione:
Il sistema di controllo VKRC2 è piu’ veloce da programmare ma perde efficenza per applicazioni che richiedono programmazione specifica. Questo sistema è creato per lavorare con uno standard definito che è tutto organizzato.Il sistema di controllo KRC2 da molto gioco alla programazione,tutte le possibilita’ sono aperte e questo è importante per attrezzature che sono molto diverse tra di loro.Comunque, la programmazione in expert mode è esattamente la stessa con tutti e due i sistemi di controllo e tutti e due sono identiche per le caratteristiche di performance nella manipolazione e il risulatato finale è uguale.
E’ sempre lo stesso robot industriale ma puo’ essere programmato in 2 maniere:
VKRC2 piu’ veloce
KRC2 piu’ versatile
Informazioni del Robot:
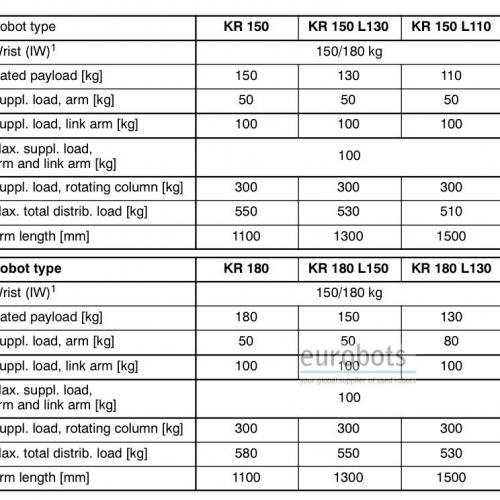
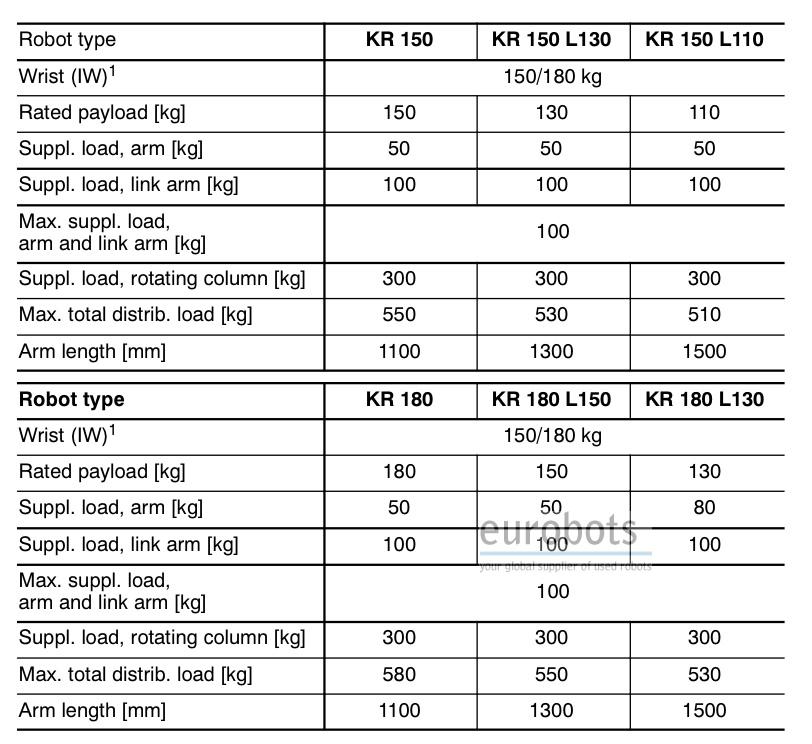
- Carico massimo del Robot: 150/180/210Kg.
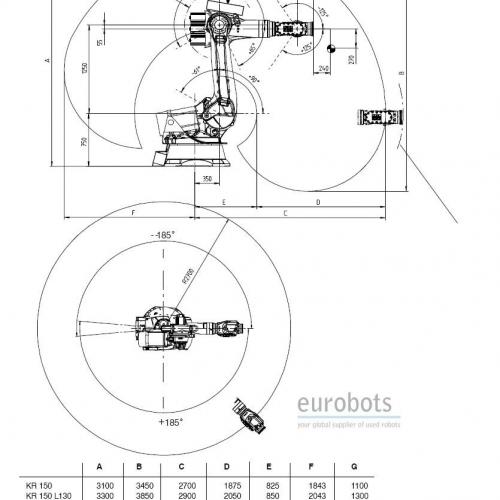
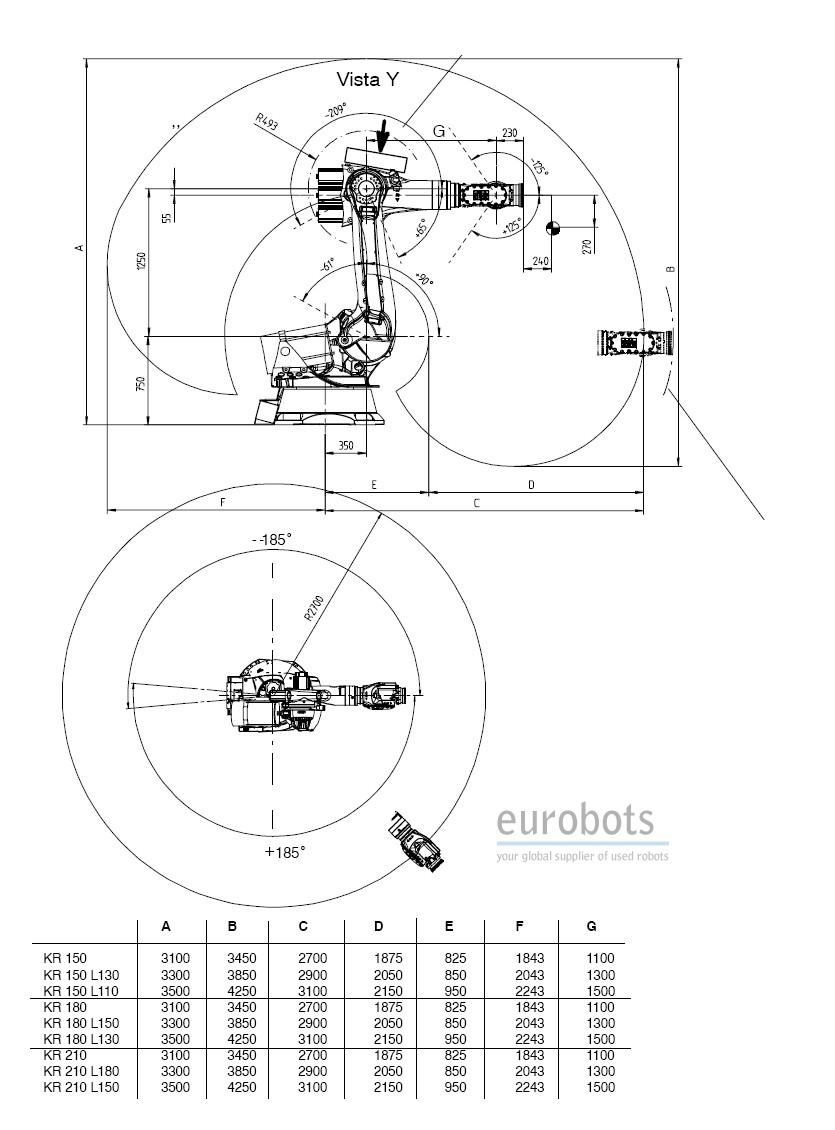
- Massima Estenzione: 2700/2900/3100 mm.
- Ripetibilità: 0.15/0,2 mm.
- Controllo: VKR C2 software 3.3.4
Velocità di movimento del Robot:
- Asse 1: 105º/sec
- Asse 2: 110º/sec
- Asse 3: 95º/sec
- Asse 4: 170º/sec
- Asse 5: 170º/sec
- Asse 6: 238º/sec
Applicazioni del Robot:
- Lavorazione a macchina
- Machine tending
- Levigatrice, smerigliatrice e messa a punto.
- Rivestimento e Legame
- Manipolazione
- Misurazione e testaggio
- Assemblaggio
- Paletizazione e altre tipi di prese
- Taglio
- Saladatura






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Polígono Ugaldeguren III, nó 32, Pabellón 1
48170-Zamudio (Vizcaya) Spain
Tel. 0039 3387620171
0039 3395310971
daniela@eurobots.com
matteotenti@eurobots.com
Ultimo Aggiornamento: 17 Apr, 2024