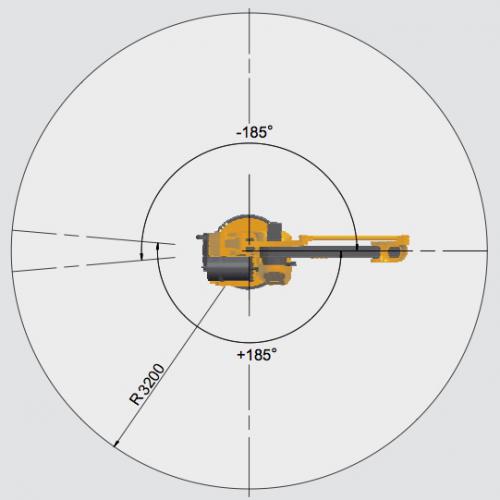
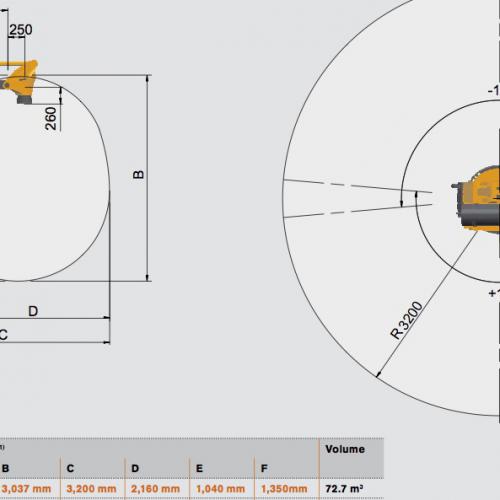
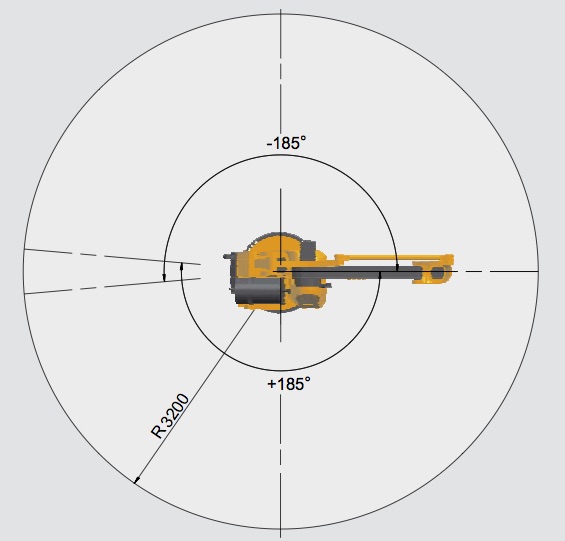
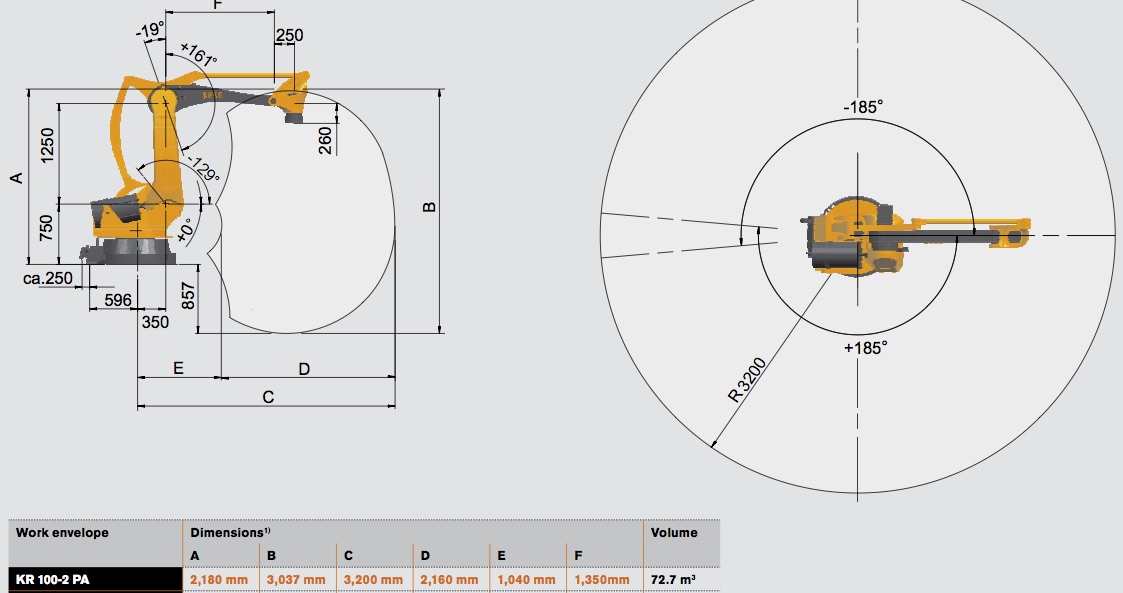
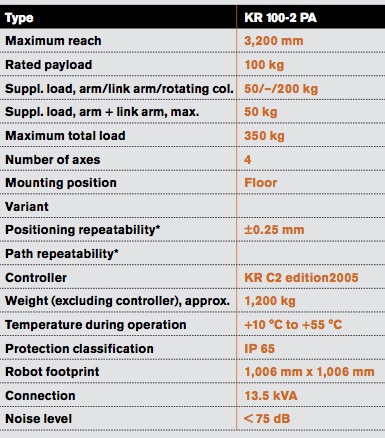
4 axis palletizing robot. Fast and robust. Outstanding arm reach of 3200 mm and a payload of 100 kg. Axis number 3 arm made of carbon fiber providing a great stress durability. Equipped with the KRC2 Ed05 cabinet and special palletizing software which importantly eases the programming process.
KR C2 edition2005 features
The controller KR C2 edition2005 (ed05) is assembled in accordance with your individual requirements, using standard PC components and drive technology that has proved its worth in the field of automation. This guarantees you high reliability and continuous access to the benefits of cutting-edge technology.
For example, it is possible to integrate up to two external axes in the basic cabinet. In conjunction with a top-mounted cabinet, as many as six external axes can be controlled.
The controller stands out on account of its simple maintenance, good accessibility, modular structure and service-friendly design, which allows components to be exchanged quickly and easily. A wide range of diagnostic and troubleshooting functions, such as remote servicing via the Internet, together with numerous expansion options and a comprehensive safety concept round out the spectrum of services offered for the KR C2 edition2005, giving you everything you need to optimize your production.
Features and Advantages
• Uniform control concept for all KUKA robots – from low payloads right up to the heavy-duty category – means reliable planning and interchangeability
• “Plug and play” functionality enables rapid start-up
• Service-proven technology and standard PC components ensure maximum availability with minimum maintenance
• Modular design allows a wide range of customized hardware and software expansions
• Efficient interfaces and high compatibility due to PC-based technology
• Networked controllers that can communicate with each other in real time make it possible for a number of synchronized robots to work together on a single workpiece







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}