




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Applicazioni
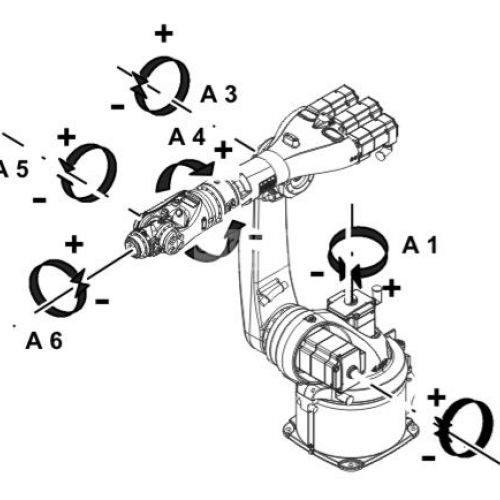
Robot industriale sei assi originariamente concepito per scopi di saldatura ad arco. Alta precisione e velocità sono caratteristiche importanti di questo robot
Dato che questo robot industriale ad alta velocità ha un polso normale in contrasto con il polso cavo, può anche perfettamente essere usato per applicazioni di movimentazione che richiedono tempi di ciclo brevi e ad alta precisione.
Equipaggiato con il controllo KR C2 Ed2005.
Caratteristiche edition2005 KR C2
Il edition2005 di controllo KR C2 (ED05) è assemblato in base alle vostre esigenze individuali, utilizzando componenti PC standard e sistemi di azionamento che ha dimostrato la sua validità nel campo dell'automazione. In questo modo si garantisce un'elevata affidabilità e la continuità di accesso ai benefici della tecnologia d'avanguardia.
Ad esempio, è possibile integrare fino a due assi esterni nell'armadio base. In combinazione con un armadio sovrapposto, fino a sei assi esterni possono essere controllati.
Il controller si distingue per la sua semplicità di manutenzione, una buona accessibilità, la struttura modulare e di facile manutenzione, che permette ai componenti di scambiare rapidamente e facilmente. Una vasta gamma di funzioni di diagnostica e risoluzione dei problemi, come ad esempio la manutenzione a distanza via Internet, insieme a numerose opzioni di espansione e di un concetto globale di sicurezza completano la gamma dei servizi offerti per la edition2005 KR C2, dando tutto ciò che serve per ottimizzare la vostra produzione.
Caratteristiche e vantaggi
• Concetto di controllo uniforme per tutti i robot KUKA - da bassi carichi utili fino alla categoria pesante - significa pianificazione affidabile e intercambiabilità
• "plug and play" funzionalità consente un rapido start-up
• Servizio di comprovata tecnologia e componenti PC standard garantiscono la massima disponibilità con una manutenzione minima
• Il design modulare consente una vasta gamma di espansioni hardware e software personalizzato
• interfacce efficienti e alta compatibilità grazie alla tecnologia basata su PC
• controllori collegati in rete che possono comunicare tra loro in tempo reale rendono possibile per un numero di robot sincronizzati lavorare insieme su un unico pezzo
Caratteristiche principali
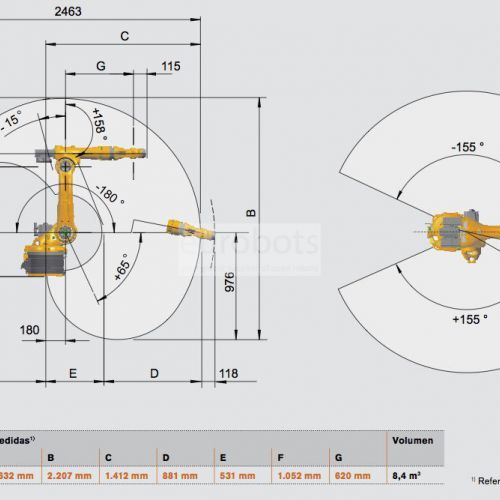
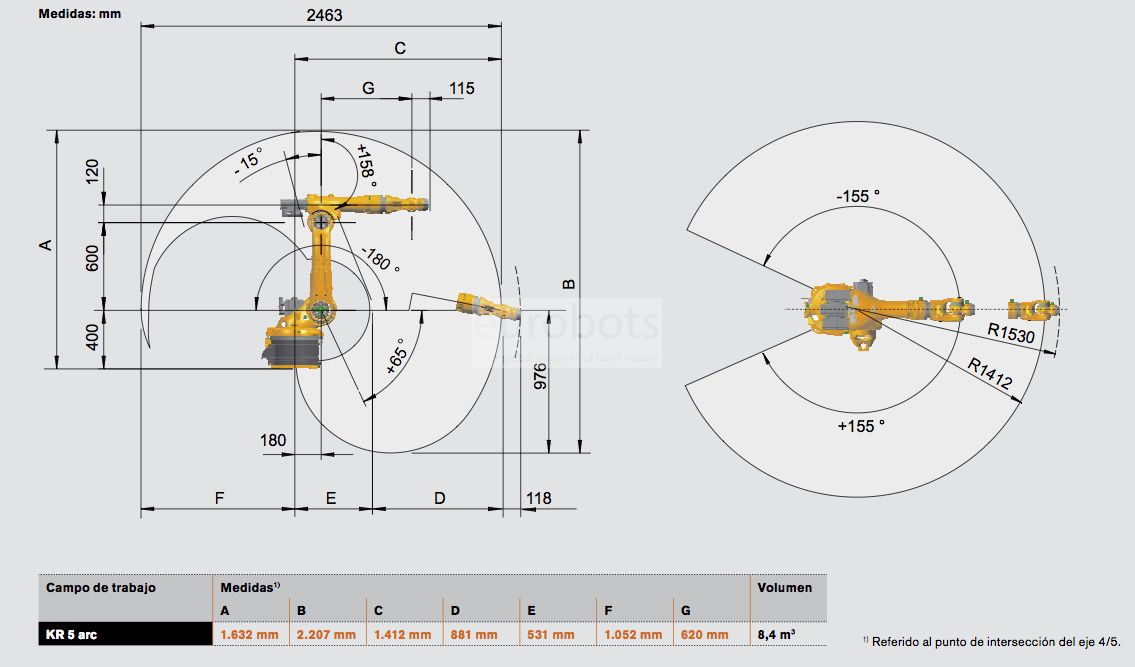
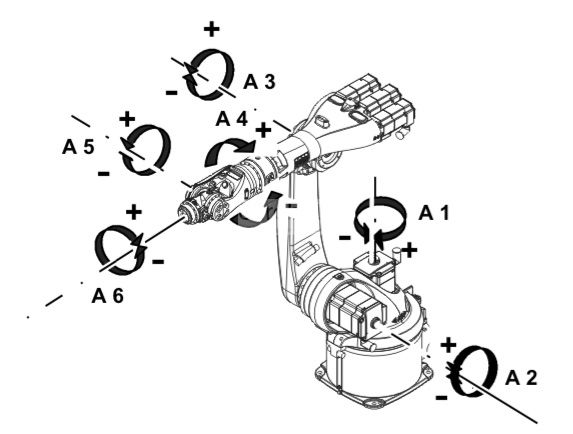
Gamma di movimento
Velocità di movimento del robot in º / s (RMS)