



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
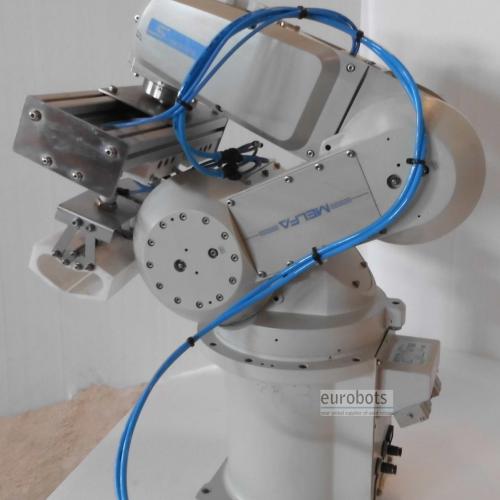
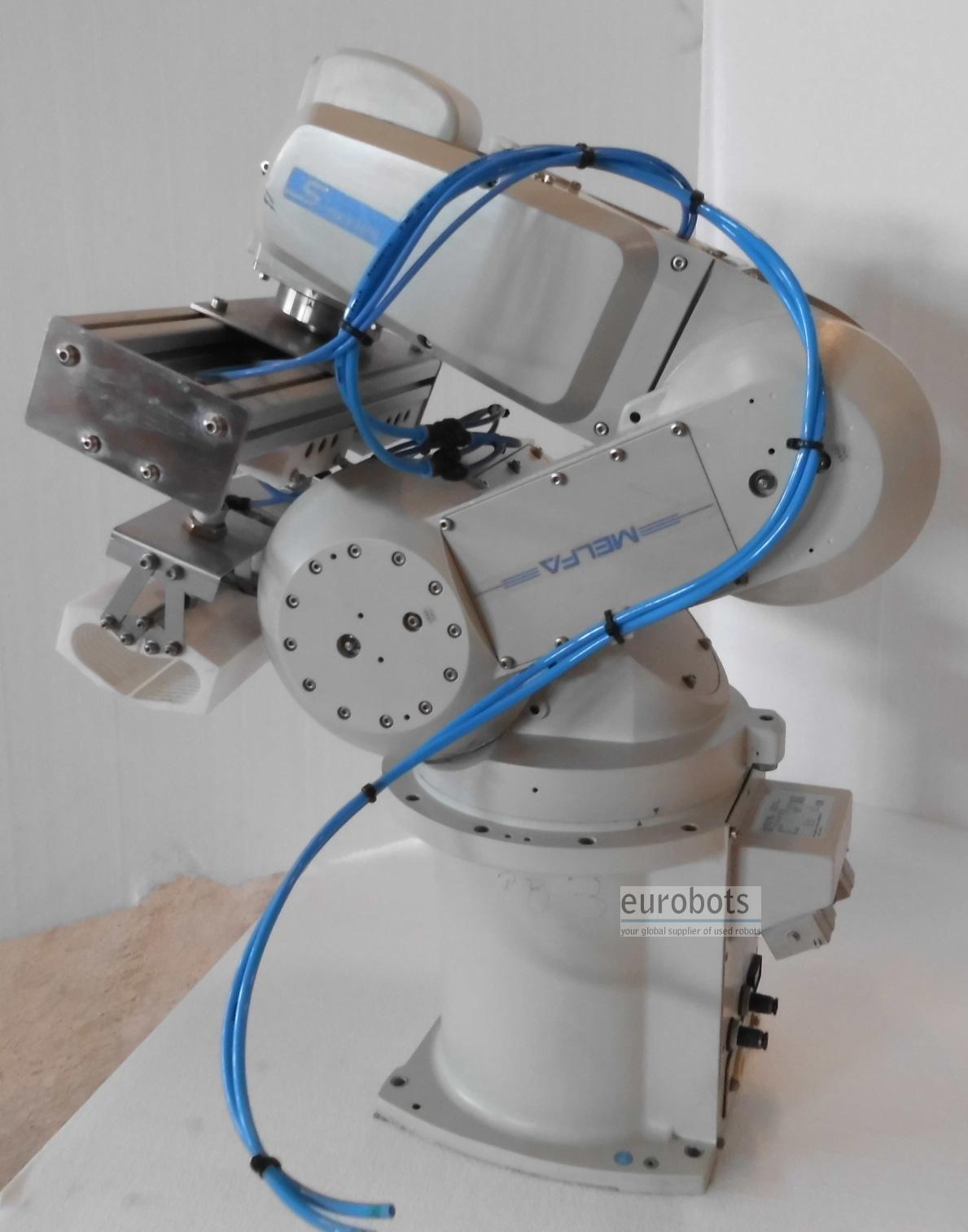
アプリケーション
モデルRV-3S
このモデルは、高速でコンパクトで使いやすいように設計されています
ハイスピードロボットは、そのカテゴリ(5,3 m / s)で最速の三菱ロボットですが、±0.02 mmの位置再現性で非常に正確です。したがって、正確さを損なうことなく、あなたのサイクルはより速くなります。
柔軟性
強力なロボットと柔軟なロボットと呼べるもの。モーターの中空構造内に回転ジョイントと減速ギヤが密閉されているため、厳しい環境(IP65)でも使用できます。
Ethernet、Profibus、CC-Linkの3種類の接続があります。
プログラムステップ数は最大5000、教示ポイント数は2500までの88種類のプログラムが可能です。
3Kgのペイロードは、異なるタイプのツールをインストールする機会を与えます。
ロボットに必要なスペースをアームに直接取り付けられたモーターとギアに減らします。
高精度グレード
典型的には、ロボットアームは未定義の点で停止しますが、RV-3Sシリーズは最終的な位置への移動を継続し、お客様に問題のない操作を提供します。すべての軸には独自のブレーキがあるため、ロボットはどんな状況でも位置を維持します。
ロボットは、異なるワークピースを検出し、正確な位置を見つけることもできます。これにより、どの場合でも100%正確な位置決めが保証されます。
ドライブシステム:ACサーボモータ(全軸ブレーキ)
位置検出方式:アブソリュートエンコーダ
アームの長さ:
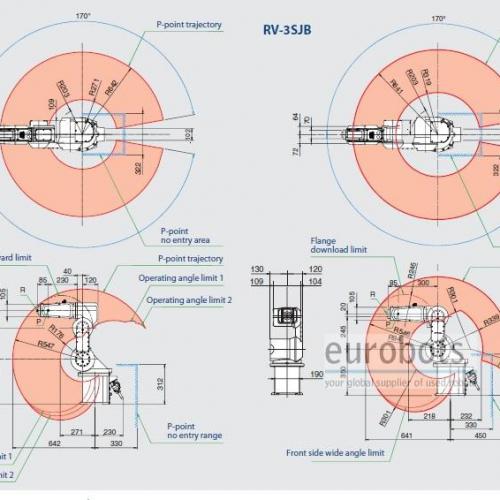
- 641 mmモデルRV-3SJB
有効搭載量:3 kg
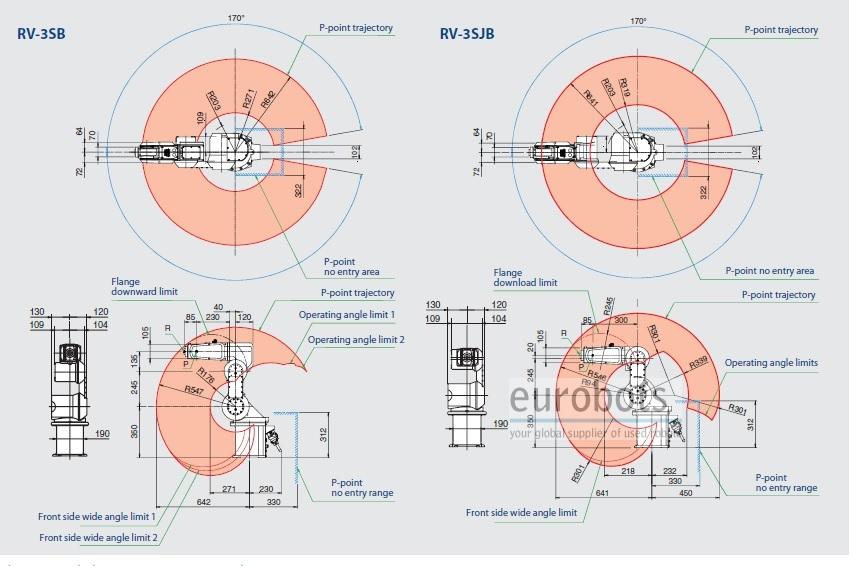
動作範囲º:
軸1:340(+ -170)
軸2:227(-92~ + 135)
軸3:290(+160〜-130)
軸4:---------------
軸5:240(±120)
軸6:720(±360)
Maximunのスピード(度/秒):
軸1:250
軸2:187
軸3:250
軸4:---
軸5:412
軸6:660
最大複合速度(mm / sec):5300
平均サイクル時間(秒):0,6 / 0,7
位置再現性:±0.02 mm
重量:33 kg
ドライブシステム:ACサーボモータ(全軸ブレーキ)
位置検出方式:アブソリュートエンコーダ
アームの長さ:
最大複合速度(mm / sec):5300
平均サイクル時間(秒):0,6 / 0,7
位置再現性:±0.02 mm
重量:33 kg