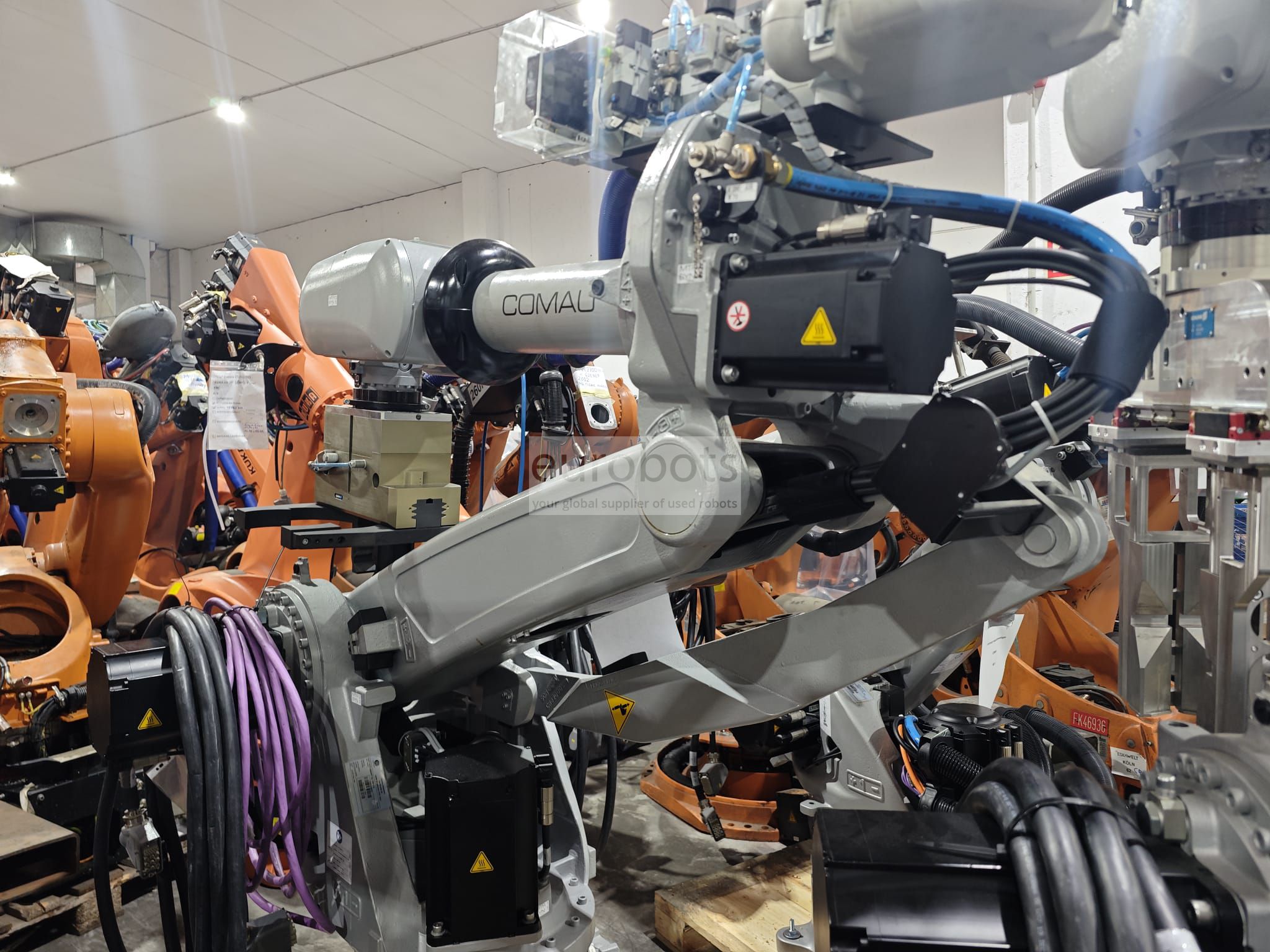
Промышленный робот NJ-130-2,6 с легкой кинематической конструкцией, с 6 осями, грузоподъемностью 130 кг и вылетом 2616 мм, что обеспечивает большую мощность, оптимизирует производительность и обеспечивает экономию энергии, что обеспечивает снижение затрат. Идеально подходит для сварочных процессов, механической обработки, сборки и транспортировки. Оборудован контроллером C5G и подвесным пультом обучения TP5.
В системе управления C5G используется процессор последнего поколения промышленного ПК APC820 с процессором Core2 Duo, который способен обеспечить высокую производительность при низком энергопотреблении.
Сохранение энергии
• Самый низкий расход в режиме ожидания, низкий расход во время работы • Система охлаждения пропорциональна работе блока управления.
• Система восстановления энергосети с программой с высоким динамическим содержанием.
Гибкость и надежность
Новое поколение полевых шин на основе технологии Hilscher, интегрированное B&R в семейство удаленного ввода-вывода X20, гарантирует гибкий и надежный интерфейс в каждом клиентском приложении. Доступны модульные интерфейсы, такие как цифровой ввод-вывод, аналоговый ввод-вывод, а также для многих типов датчиков положения, энкодеров, резольверов и т. д.
Безопасность
Встроен в модуль SDM, сертифицирован TUV (двухканальный аварийный останов, активирующее устройство, включение логического привода), функция снятия тормоза на манипуляторе робота и функция блокировки для взаимодействия человека и робота.
Модульность/Расширяемость
Модульная система для приводов до 13 осей в базовом шкафу с функцией питания и модели робота
Одновременное управление несколькими роботами
Аппаратная архитектура рассчитана на управление до 16 осями в «многоплечей» конфигурации с прикладным блоком.
Автономное 3D-программирование с помощью Robosim Pro
Управление несколькими приложениями
Возможность управлять множеством приложений одновременно.
Открытый контроллер C5G: стать настоящими драйверами движения робота
Это позволяет разрабатывать индивидуальные алгоритмы движения и специальные приложения с использованием датчиков.
Доступны основные функции программного обеспечения
• Автоматическая идентификация полезной нагрузки: автоматическая идентификация полезной нагрузки для оптимизации движения робота.
• Обнаружение столкновений: аварийная остановка робота в случае столкновения для защиты механика и оборудования.
• Совместное и синхронизированное движение: скоординированное и одновременное управление несколькими роботами и вспомогательными осями (линейная направляющая, сервопистолет, позиционеры и другое прикладное оборудование).
• Отслеживание конвейеров и датчиков: отслеживание деталей, движущихся на линейных и кольцевых конвейерах. Точность отслеживания траектории за счет использования различных типов внешних датчиков
• Технология Joint Soft Servo Technology: способность отдельных суставов робота поддаваться внешним силам, необходимым для конкретного применения.
• Области помех: области различной формы могут быть динамически определены для ограничения рабочего пространства робота.
• Абсолютная точность робота: алгоритм адаптации фактической кинематики к теоретической модели, запрограммированной в автономном режиме.



{kind=link}
{kind=link}
{kind=link}