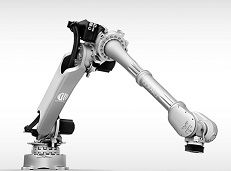
Robot industriel NJ-16-3.1 de la série NJ avec une conception pour les charges moyennes, avec une capacité de charge utile de 16 kg et une plage de 3108 mm qui fournit une plus grande vitesse et optimise les temps de cycle. Idéal pour les procédés de soudage à l'arc, l'usinage, l'assemblage, la manutention. Equipé du contrôleur C5G et du pendentif d'apprentissage TP5.
La commande C5G utilise la dernière génération de PC industriels APC820 avec processeur Core2 Duo qui est capable d'obtenir de hautes performances avec une faible consommation énergétique
Économie d'énergie
• Consommation la plus faible en veille, faible consommation pendant les opérations • Système de refroidissement proportionnel aux opérations de l'unité de contrôle
• Système de récupération de réseau énergétique avec un programme à contenu dynamique élevé
Flexibilité et fiabilité
La nouvelle génération de bus eld basée sur la technologie Hilscher, intégrée par B & R dans leur famille d'E / S distantes X20, garantit une interface souple et fiable dans chaque application client. Des interfaces modulaires sont disponibles, telles que les E / S numériques, les E / S analogiques et pour de nombreux types d'encodeur de capteur de position, de résolveur, etc.
sécurité
Intégré dans le module SDM, TÜV certi ed (arrêt d'urgence double canal, validation, activation de la logique) fonction de freinage sur le bras du robot et fonction de verrouillage pour la coopération homme-robot
Modularité / Extensibilité
Système modulaire pour les entraînements jusqu'à 13 axes dans la fonction d'armoire de base de la puissance, et le modèle de robot
Gestion simultanée de plusieurs robots
Architecture matérielle conçue pour gérer jusqu'à 16 axes en configuration "multi-bras" avec boîte d'application
Programmation 3D hors ligne avec Robosim Pro
Gestion multi-applications
Possibilité de gérer de nombreuses applications en même temps
Contrôleur ouvert C5G: pour devenir les vrais pilotes du mouvement du robot
Il permet le développement d'algorithmes de mouvement personnalisés et d'applications spéciales avec l'utilisation de capteurs
Principales fonctionnalités du logiciel disponibles
• Identification automatique de la charge utile: identification automatique de la charge utile pour optimiser le mouvement du robot
• Détection de collision: arrêt d'urgence du robot en cas de collision pour protéger le mécanicien et l'équipement
• Mouvement coopératif et synchronisé: gestion coordonnée et simultanée de plusieurs robots et axes auxiliaires (trajectoire linéaire, servo-pistolet, positionneurs et autres équipements d'application)
• Traçabilité et suivi des capteurs: suivi des pièces en mouvement sur les convoyeurs linéaires et circulaires. Précision dans le suivi de la trajectoire par l'utilisation de différents types de capteurs externes
• Technologie de servocommande souple: la capacité des articulations de robots individuels à céder aux forces externes requises par l'application spécifique
• Régions d'interférence: des régions de différentes formes peuvent être définies dynamiquement pour limiter l'espace de travail du robot
• Robot Absolute Accurancy: algorithme pour l'adaptation de la cinématique actuelle au modèle théorique programmé hors-ligne


{kind=link}
{kind=link}