




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Aplicaciones
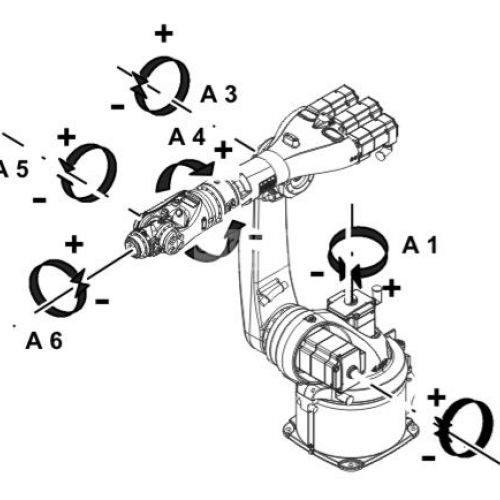
Robot industrial de seis ejes concebido originalmente para fines de soldadura por arco. De alta precisión y velocidad son características destacadas de este robot
Como este robot industrial de alta velocidad tiene una muñeca estándar, y no a la muñeca hueca, también puede perfectamente ser utilizado para aplicaciones de manejo que requieren tiempos de ciclo cortos y alta precisión.
Equipado con el control KR C2 Ed2005.
Características edition2005 KR C2
El edition2005 de control KR C2 (ED05) se monta de acuerdo con sus necesidades individuales, el uso de componentes de PC estándar y tecnología de unidad que ha demostrado su valía en el campo de la automatización. Esto le garantiza una alta fiabilidad y un acceso continuo a los beneficios de la tecnología de vanguardia.
Por ejemplo, es posible integrar un máximo de dos ejes externos en el armario básico. En conjunto con un armario suplementario, hasta seis ejes externos pueden ser controlados.
El controlador se destaca por su sencillo mantenimiento, buena accesibilidad, estructura modular y el diseño de fácil mantenimiento, que permite a los componentes que se intercambian de forma rápida y sencilla. Una amplia gama de funciones de diagnóstico y solución de problemas, tales como el mantenimiento remoto a través de Internet, junto con numerosas opciones de expansión y una ronda global concepto de seguridad fuera del espectro de los servicios ofrecidos por el edition2005 KR C2, que le da todo lo que necesita para optimizar su producción.
Características y Ventajas
• Concepto de control uniforme para todos los robots KUKA - a partir de cargas bajas hasta la categoría de servicio pesado - un medio fiable de planificación y capacidad de intercambio
• "Plug and play" funcionalidad permite una rápida puesta en marcha
• Servicio tecnología probada y componentes de PC estándar garantizan una disponibilidad máxima con el mínimo mantenimiento
• El diseño modular permite una amplia gama de expansiones de hardware y software a medida
• Interfaces eficiente y una alta compatibilidad debido a la tecnología basada en PC
• controladores de red que pueden comunicarse entre sí en tiempo real hacen posible que una serie de robots sincronizados para trabajar juntos en una sola pieza
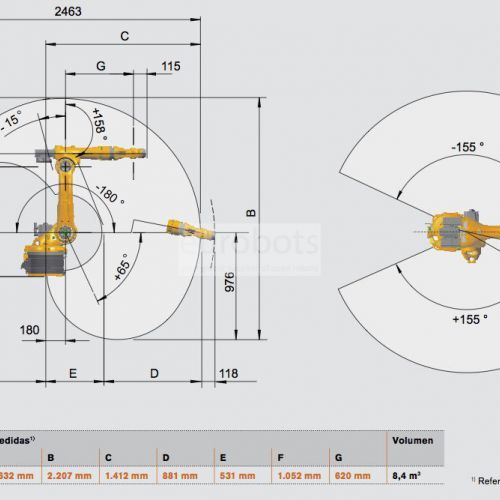
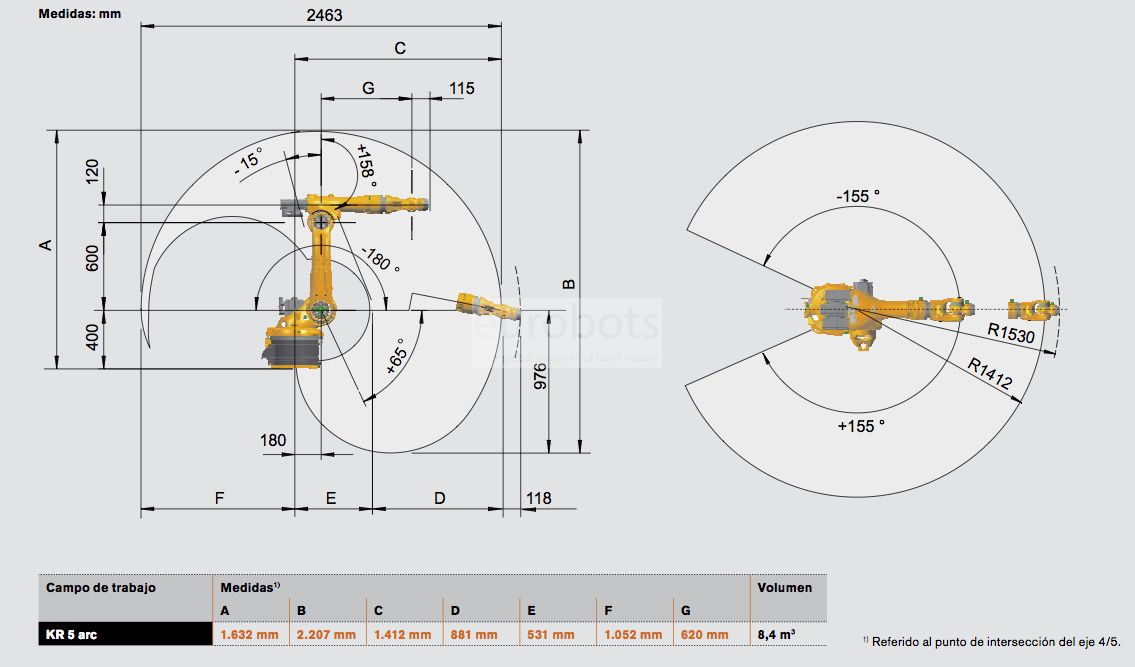
Especificaciones principales
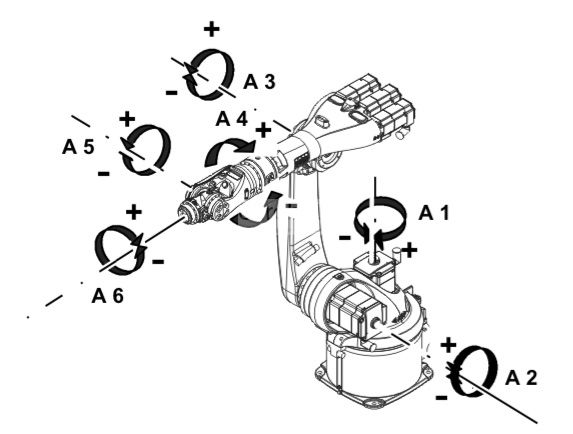
Rango de movimiento
La velocidad de movimiento del robot en º / s (RMS)