ABB IRB 4400FS30 M98A
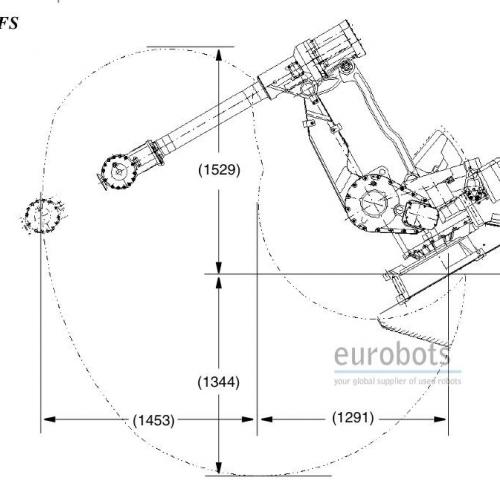
Jahr 1999. Bord lange Arm-Version des IRB4400 mit horizontalem 2744-Mm-Arm reicht und 30-Kg-Nutzlast. Im Gegensatz zu herkömmlichen sechs-Achsen Robotern haben Bord-Roboter ihren Hauptarbeitsumschlag unter dem Fuß. So, von seiner Hochposition auf der Spitze oder neben dem IMM, erreicht der IRB 4400 FS30 mehr als 1 M unter seinem Fuß, schnellen und leichten Zugang zum Werkstück oder zum Sterben in der Maschine zur Verfügung stellend. Die außergewöhnliche Reichweite, ergänzt durch eine Nutzlast von 30 Kg, macht den IRB 4400 zu Anwendungen besonders angepasste FS, wo Raum an einem Minimum ist, als häufig in der Plastikeinspritzung gefunden wird, die Anwendungen formt.
Der IRB 4400FS ist eine attraktive Alternative zum drei-Achsen Roboter, traditionell verwendet für das IMM-Neigen. Die sechs-Achsen Technologie des ABB Roboters macht es Vorgesetzten in der Vielseitigkeit, Reichweite und Präzision - Qualitäten, dass Hilfe Zykluszeit minimiert und Produktqualität optimiert.
Zusätzlich können die IRB 4400 Postprozess-Aufgaben in der Parallele während jedes 'Schusses' durchführen, während herkömmliche drei-Achsen Roboter müßig wegen ihrer rein Zungenbewegungsbeschränkungen bleiben. Postprozess-Aufgaben können die Reinigung, brennend, Qualitätskontrolle einschließen, schlagend und Zusammenbau, Pflanzenentwerfer erlaubend, die Zahl von abwärts gelegenen Stationen zu reduzieren und Pflanzendurchsatzzeiten zu reduzieren.
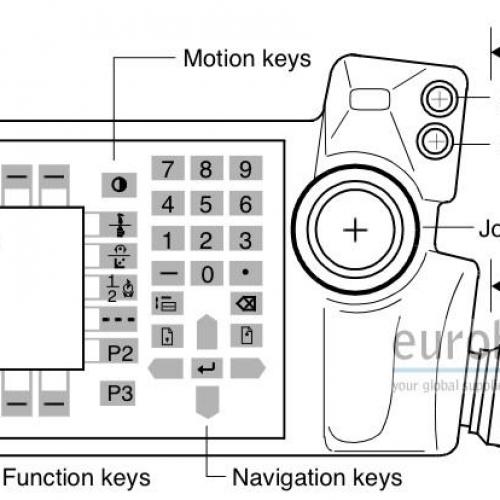
Der S4C Kontrolleur ermöglicht das SCHNELLE Instruktionsbilden, das leichter programmiert.
Roboterinfos:
- Anzahl der Achsen: 6
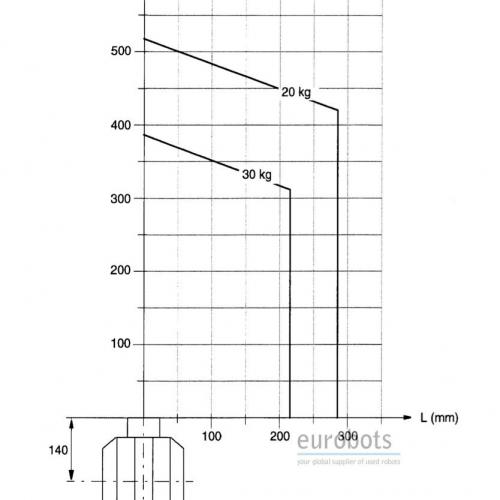
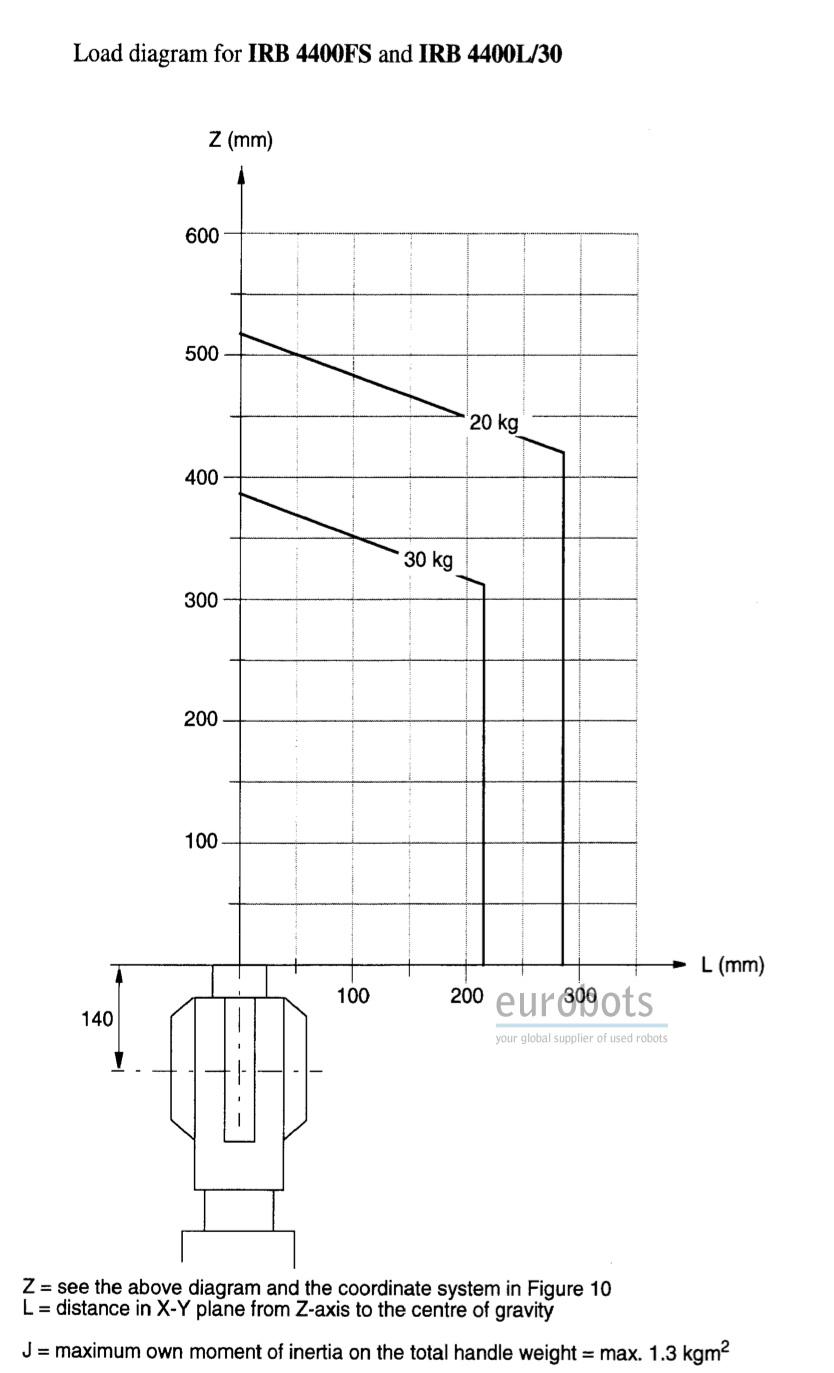
- Max. Traglast: 30 Kg.
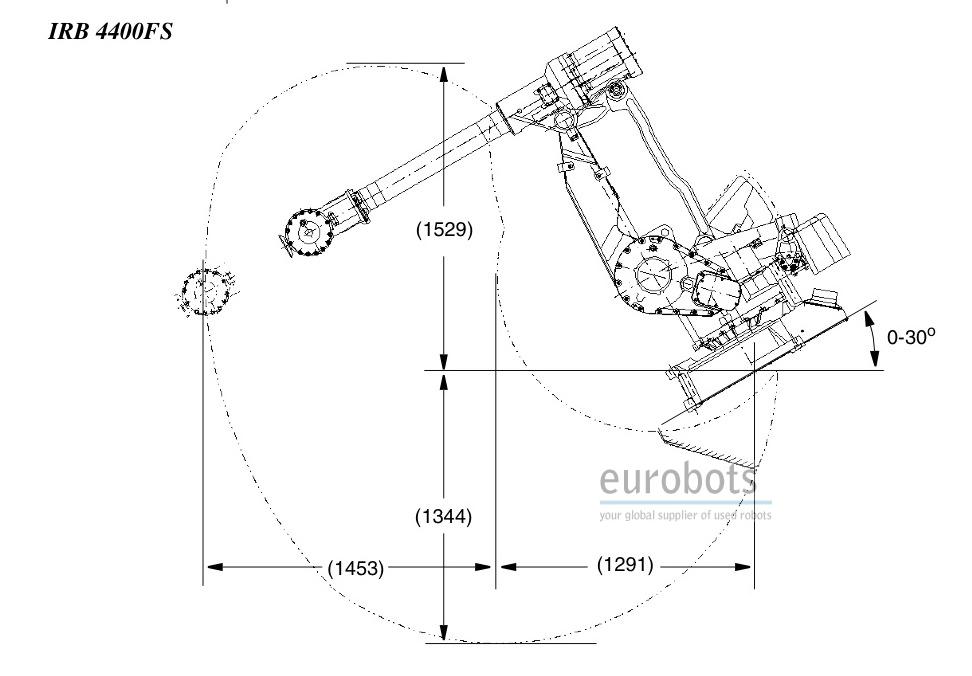
- Max. Arbeitsbereich: 2744 mm.
- Wiederholgenauigkeit: 0,1 mm.
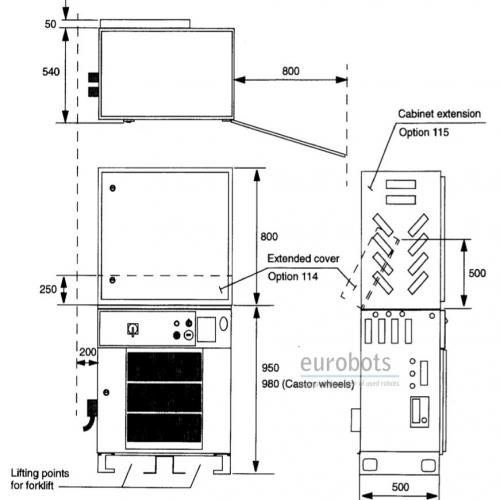
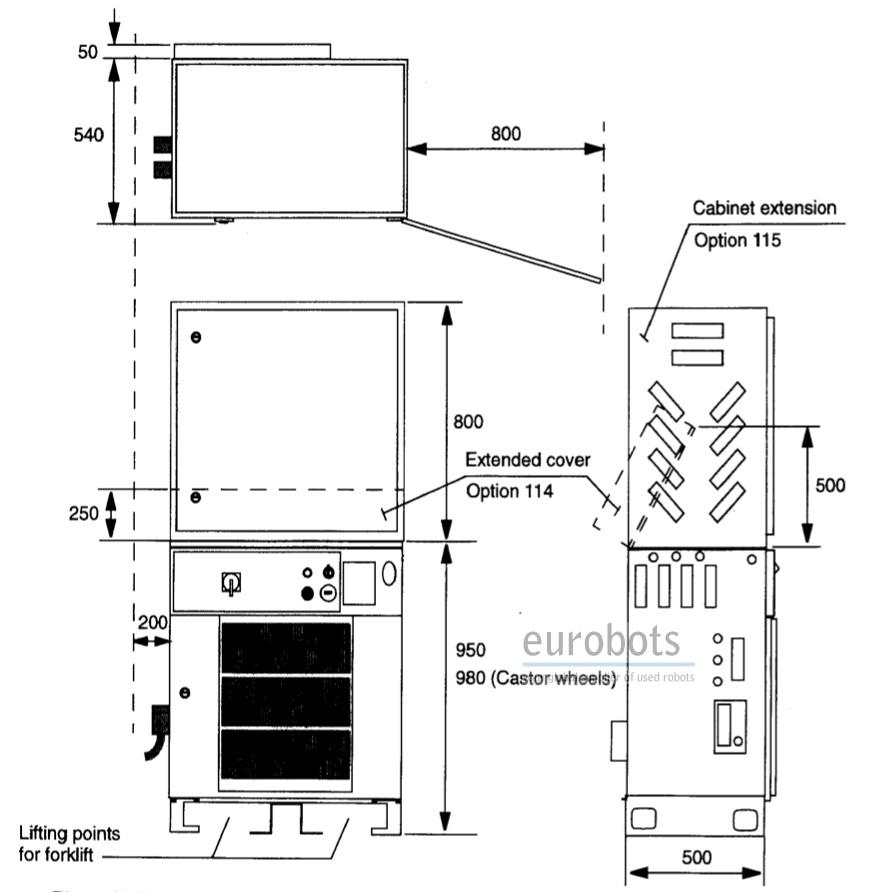
- Steuerung : M98A S4C.
Achsdaten:
- Achse 1: 150º/seg
- Achse 2: 120º/seg
- Achse 3: 120º/seg
- Achse 4: 225º/seg
- Achse 5: 250º/seg
- Achse 6: 330º/seg





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Polígono Ugaldeguren III, nº 32, Pabellón 1
48170-Zamudio (Vizcaya) Spain
Tel. 0039 3387620171
0039 3395310971
daniela@eurobots.com
matteotenti@eurobots.com

Zuletzt aktualisiert: 21 Jun, 2026