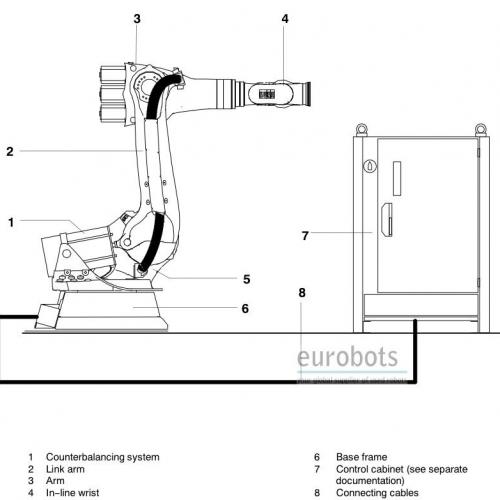
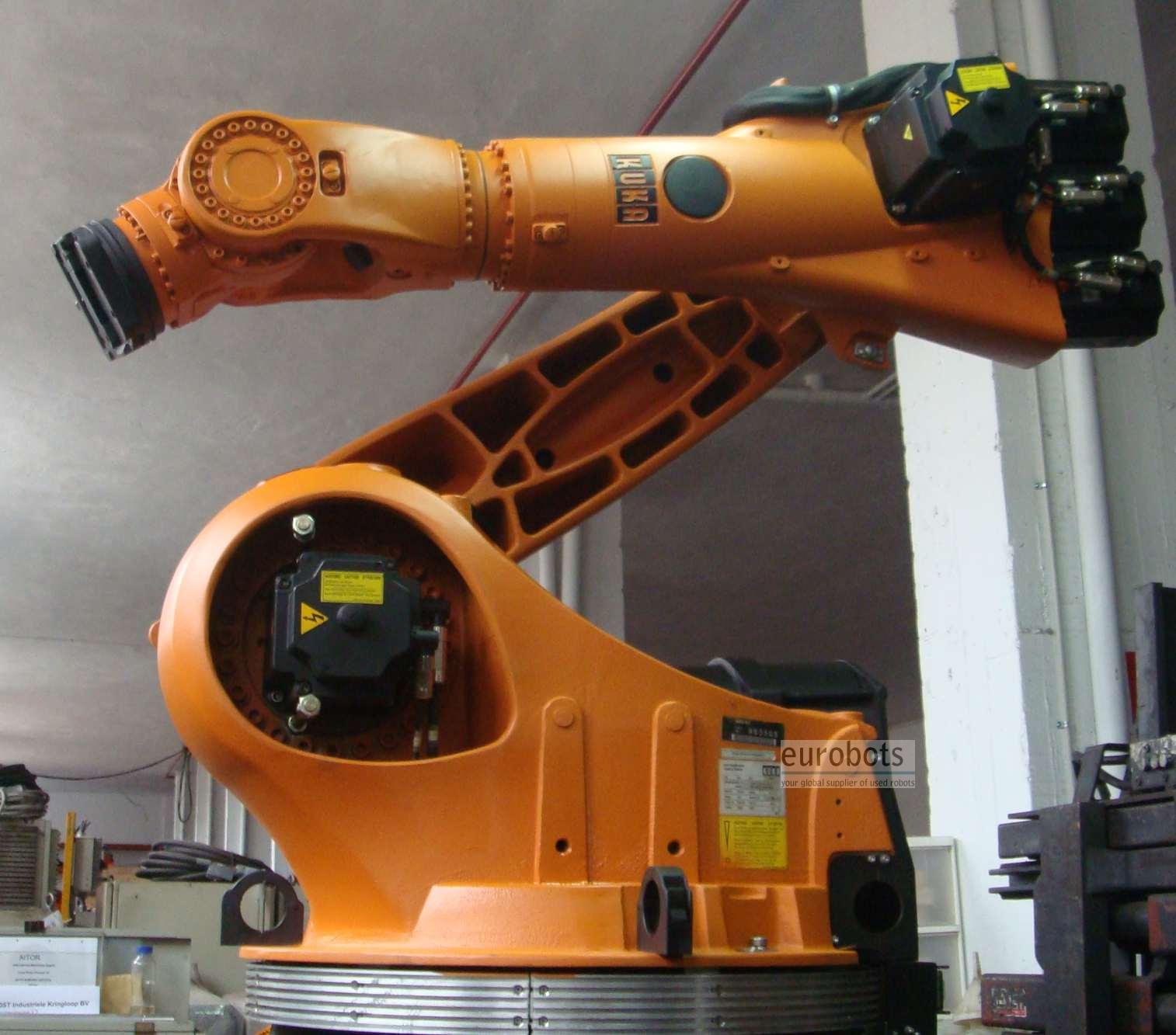
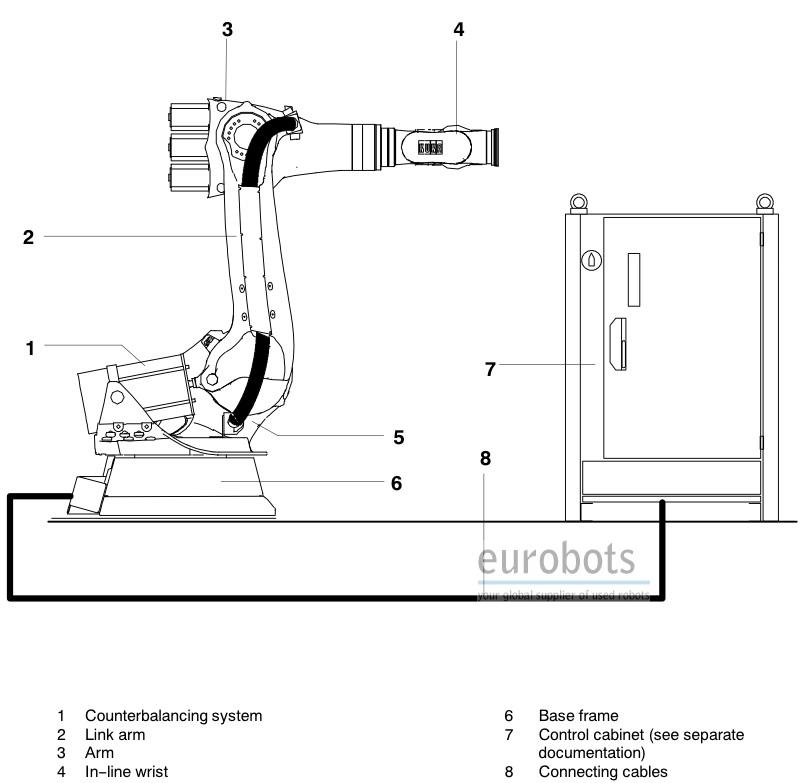
KUKA KR210 VKRC2 control
Robot 6 ejes de carga pesada 210/150 kg y 2700/3100 mm de alcance. Es idéntico al KR210 series 2000 con control KRC2 estándar. La diferencia reside en el control, VKRC2 que es el control KRC2 de KUKA utilizado en el grupo VW. El hardware del armario de control es casi idéntico. La versión de software es la 3.3.4. Es un software que tiene la misma filosofía y entorno de programación que una versión KRC2 estándar. Hay algunas diferencias que comentamos a continuación.
Diferencias de programación entre el KRC2 y el VKRC2
La característica principal es que todo el sistema es abierto desde el primer momento, las opciones que podemos manejar para la programación están abiertas a cualquier programador en dos niveles:
Usuario:
Nivel predeterminado de la programación, nos permite calcular las herramientas y bases de trabajo externas, calibración del robot, desarrollo de programas, modificar, duplicar, eliminar, etc.. También en este nivel se pueden modificar las variables definidas en el programa, activar salidas y consultar entradas.
Experto:
Este nivel se define como nivel avanzado, todas las opciones quedan abiertas para el programador, en este caso, la creación de programas queda excluida, en su defecto, se pueden editar los programas creados para introducir los códigos de programa.
Es en este nivel donde también se configuran los drivers para las comunicaciones con las periferias.
Todos los programas que se crean con este sistema, se hacen con los nombres que el programador crea conveniente para cada función que realicen
“coger_pieza”, “subir_centrador” etc…
La gestión de los programas “principales” se puede efectuar a través del programa “Cell” vinculado a una línea de PLC y todos los programas pueden vincularse entre ellos..
Sistema con control “VKRC-1/2”
Este sistema esta creado junto a Volkswagen para trabajos en automoción.
La característica principal es la facilidad de programación y el rápido diagnostico del sistema.
En el sistema VKRC1/2 también existen los modos usuario y experto, pero en este caso todo se puede hacer desde el nivel usuario. El acceso a nivel experto se hace con unas claves.
La programación se realiza en un menor tiempo debido a la característica principal de introducción de código; esto se realiza con diferentes opciones que nos van apareciendo en las teclas dependiendo de las opciones que tengamos, en resumen, no podemos introducir mal el código de programación. Evidentemente, el sistema no nos avisara si las instrucciones que añadimos son las adecuadas.
Ejemplo: (OUT “56” TRUE ), cuando quizás lo necesario en ese momento seria (OUT “56” FALSE)
Los programas que podemos usar con este sistema ya tienen una estructura definida.
Folge: Son los programas que se gestionan a través del automático externo y solo pueden ser llamados por un autómata.
Up: Subprograma con movimiento que solo puede ser llamado desde una Folge o desde otra Up.
Makro: Subprograma sin movimiento el cual puede ser llamado desde una Folge, una Up u otra Makro.
Con este sistema perdemos la posibilidad de calcular las bases de trabajo.
Se podría arreglar averiguando tres puntos definidos en la base y tratarlos como si fuera una herramienta externa.
Una vez calculada la herramienta de trabajo, llevamos el punto calculado a cualquier punto de la base a calcular y las coordenadas cartesianas resultantes serian las coordenadas de ese punto en concreto.
Resumiendo:
El sistema VKRC1/2 es más rápido de programar pero pierde efectividad para aplicaciones que requieran una programación más especifica.
Es un sistema creado para trabajar con un estándar definido del cual está todo definido
El sistema KRC1/2 da mucho mas juego a la hora de programar, todas las posibilidades están abiertas y eso es importante para realizar instalaciones que difieren mucho unas de otras.
De todas maneras, la programación en modo experto es exactamente la misma con los dos sistemas, tanto las características de funcionamiento como el manejo y los resultados finales son idénticos.
Se trata del mismo robot con la posibilidad de programar de dos maneras diferentes:
VKRC-1/2 más rápida.
KRC1/2 más versátil.
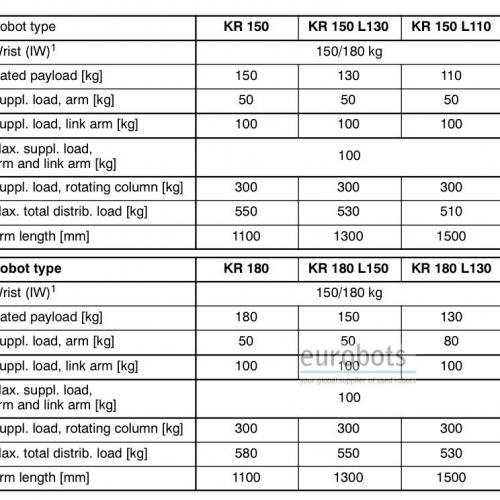
Datos generales:
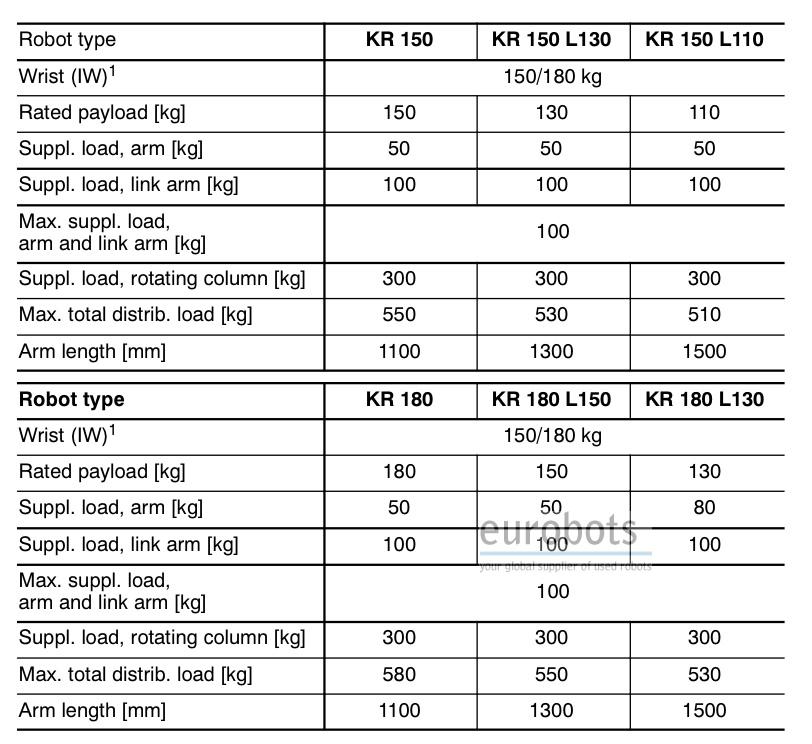
- Capacidad carga: 150/180/210Kg.
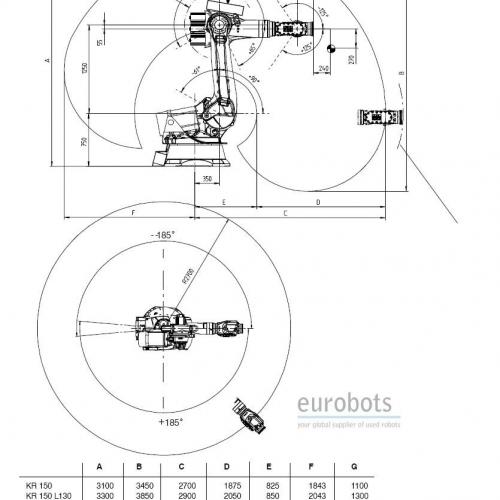
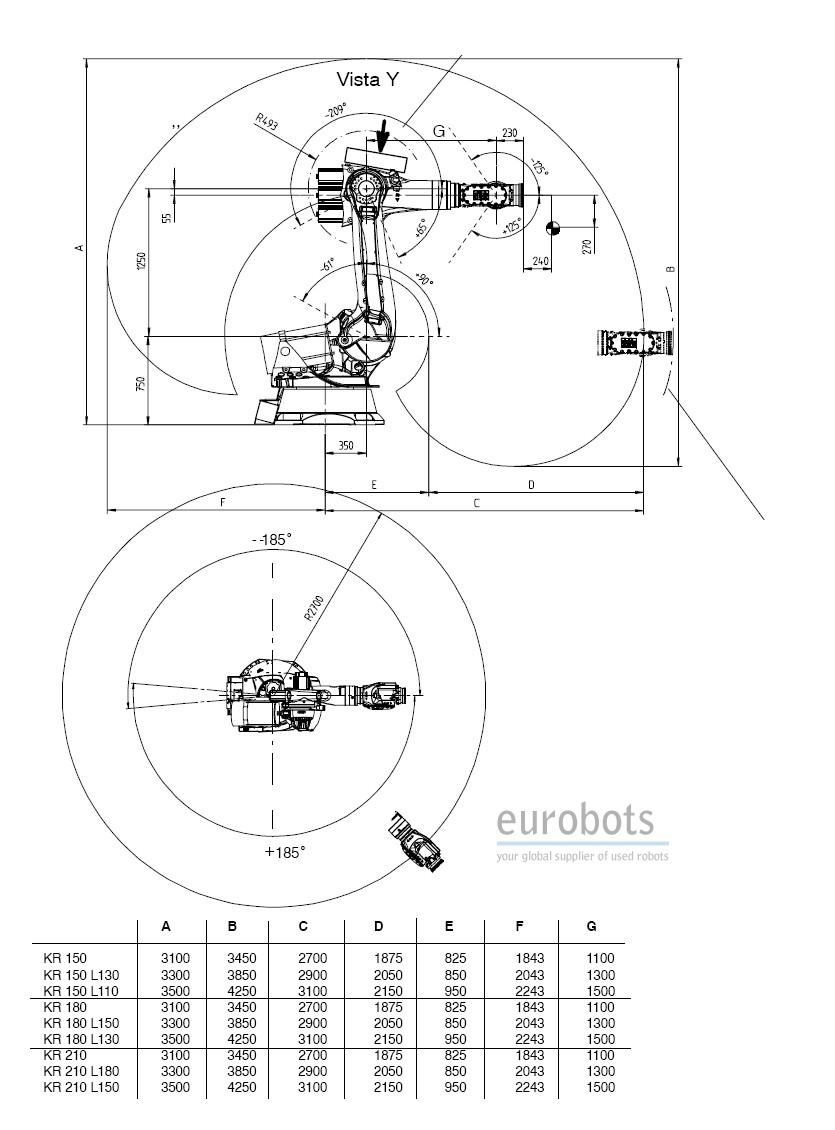
- Máximo alcance: 2700/2900/3100 mm.
- Precisión en la repetición: 0.15-0.2 mm.
- Controlador: VKR C2 versión software 3.3.4
Movimiento y Velocidad del Robot:
- Eje 1: 105º/seg
- Eje 2: 110º/seg
- Eje 3: 95º/seg
- Eje 4: 170º/seg
- Eje 5: 170º/seg
- Eje 6: 238º/seg
Aplicaciones del Robot:
- Mecanizado
- Carga de máquina
- Pulir, esmerilar, desbarbar
- Revestimiento y pegamento
- Manipulación
- Medición y control
- Montaje
- Paletización y preparación de pedidos
- Corte
- Soldadura






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Polígono Ugaldeguren III, nº 32, Pabellón 1
48170-Zamudio (Vizcaya) Spain
Tel. 0039 3387620171
0039 3395310971
daniela@eurobots.com
matteotenti@eurobots.com

Última actualización: 21 Jun, 2026